
Étiquette : Moment
Comoment de torseurs et automoment d’un torseur
Mise en contexte
Tout vient d’une question apparemment anodine du sujet de mines-pont 2015 :
Après une présentation du robot humanoïde Lola, la première question est celle-ci : montrer que  est un glisseur.
est un glisseur.
est un glisseur.Et cette question n’est pas aussi évidente qu’elle n’en a l’air. Mais revenons en à la base.
La notion de torseur
Un torseur 
Bien entendu, le fait que tout ces champs vectoriels sont bien équiprojectifs a été prouvé dans un autre billet.
Puisqu’en pratique, nul n’est besoin de connaître la définition d’un torseur pour l’utiliser en virtuose : il suffit en fait de connaître la trinité, puisque la connaissance complète d’un torseur se résume en deux vecteurs et une relation : la valeur de ce torseur en un point, appelé moment et la résultante. Ces deux dernières sont liés par une relation fondamentale, à l’état civil connu sous le nom de formule de Varignon mais souvent appelé par son nom de scène : BABAR :

Je pense que vous aurez deviné l’origine de ce pseudonyme.
Il est trivial de montrer qu’un champs de vecteurs qui respecte la relation de Varignon est un champ de vecteur équiprojectif. Mais est-il vrai que tous les champs de vecteur équiprojectif respecte la formule de Varignon ? Cela a été montré dans deux billets précédents par deux approches différentes : une algébrique et une géométrique.
La notion du comoment de deux torseurs
Soit 2 torseurs 


Avec 


Première étape : prouvons que le comoment est indépendant du choix du point
Pour cela, on va étudier la différence entre les deux calculs. Pour gagner du temps, on va directement factorisé certains éléments :

Or, par la formule de Varignon, on peut utiliser la relation :

Et cela nous donne donc pour la différence de nos 2 comoments :

En utilisant les propriétés du produit mixte suivantes, on va s’en sortir (pour une preuve de cette propriété, elle est dans ce billet) :

On arrive alors à :

CQFD
Automoment d’un torseur
L’automoment d’un torseur est la moitié de son comoment avec lui-même, c’est-à-dire :

Par la propriété précédente, on sait que l’automoment d’un torseur est un invariant scalaire d’un torseur.
Introduction des 3 torseurs particuliers
Torseur nul
Le torseur nul est un torseur de résultante nulle et de moment nul en tout point.
Torseur couple
Le torseur couple est un torseur de résultante nulle.
Torseur glisseur
Le torseur glisseur est un torseur où il existe un point 

Théorème à démontrer : le fait que l’automoment d’un torseur est nul est équivalent au fait que le torseur soit un torseur particulier
L’implication dans un sens est triviale : il est facile de calculer les automoments des torseurs particuliers et de montrer qu’ils sont forcément nuls. La réciproque est plus dure… Pour cela, nous allons revenir sur la notion d’axe central.
Axe central d’un torseur quelconque
L’axe central d’un torseur est une droite où le moment est colinéaire à la résultante dans le cas d’un torseur qui n’est ni le torseur nul, ni un torseur couple : en effet, dans ces deux cas-là, les points où le moment est colinaire à la résultante correspond à l’entièreté de l’espace, car le moment est nul en tout point, et donc colinéaire à n’importe quel vecteur.
Trouver l’axe central d’un torseur
On va définir une base sur mesure dans le cas où l’on connaît le moment d’un torseur en un point 
- Comme
est non-nul (on a vu que cela n’avait pas de sens de parler d’axe central dans le cas contraire), on définit :
;
- Si
, alors on a le point
est l’axe central.
- Il nous reste le cas quelconque :
avec
: on définit alors :
.
- Dans ce dernier cas, on définit
afin de compléter une base orthonormée directe.
Dans le cas où l’on n’a pas encore trouver un point de l’axe central, on va le chercher : on va l’appeler 

Calculons alors le moment en

Or, si on reprend la définition de différents axes, on a :


On a donc, comme conditions pour avoir le moment
quelconque (ce qui nous définit notre axe) ;
nul ;
.
On peut donc toujours définir un axe central d’un torseur à partir du moment où le torseur n’est ni le torseur nul, ni un torseur couple.
Propriété suplémentaire d’un axe central
On peut remarquer que tous les moments sur l’axe central sont égaux entre eux. De plus, la partie colinéaire à la résultante du moment est forcément constante sur tous les points de l’espace. Ainsi, ce sont les points où la norme du moment est minimale.
Preuve du théorème
Donc, si nous avons un comoment nul, on a :
- soit le torseur est nul ;
- soit le torseur est un torseur couple ;
- soit le torseur est quelconque, mais avec une partie colinéaire à la résultante nulle (sinon le produit scalaire entre résultante et moment ne serait pas nul) : donc, sur son axe central, le moment est nul : c’est donc un glisseur.
CQFD.
Conclusion
Cette petit propriété peut ainsi permettre de vérifier qu’un torseur est un glisseur très simplement : il faut prouver que l’automoment de ce torseur est nul, et que la résultante est non-nul : c’était typiquement le cas sur l’exercice du Lola.
Équiprojectivité des moments et formule de Varignon : preuve pour les torseurs vus en CPGE
Il a été déjà vu dans 2 billets précédents (preuve de Varignon algébrique et preuve de Varignon géométrique) que la propriété d’équiprojectivité était équivalente à la formule de Varignon : en particulier, dès qu’on a un champs de moment qui possède la propriété d’équiprojectivité, il est possible de définir une résultante.
On va donc compléter la preuve donnée précédemment en prouvant, torseur par torseur, la propriété d’équiprojectivité des torseurs. En se basant sur les résultats généraux, on saura qu’il existe une résultante correspondant à ce champs de moments. En faite, pour presque tous les torseurs, on va retrouver directement la valeur de la résultante en prouvant l’équiprojectivité.
Torseur cinématique
Pour une illustration de à quoi peut ressembler le champ des vitesses, il y a cette vidéo. On commence par le plus simple : on veut prouver que :

On repart alors de la définition d’une vitesse, avec un point 


![\overrightarrow{V(A\in 1/2)} = \left[ \dfrac{d \overrightarrow{O_2 A} }{dt} \right]_{B_2}](https://s0.wp.com/latex.php?latex=%5Coverrightarrow%7BV%28A%5Cin+1%2F2%29%7D+%3D+%5Cleft%5B+%5Cdfrac%7Bd++%5Coverrightarrow%7BO_2+A%7D+%7D%7Bdt%7D+%5Cright%5D_%7BB_2%7D+&bg=ffffff&fg=1a1a1a&s=0&c=20201002)
On obtient alors, si on calcule la différence entre 2 vitesses en 2 points différents, on obtient, par linéarité de la dérivée :
![\overrightarrow{V(B\in 1/2)} - \overrightarrow{V(A\in 1/2)} = \left[ \dfrac{d \overrightarrow{O_2 B} }{dt} \right]_{B_2} - \left[ \dfrac{d \overrightarrow{O_2 A} }{dt} \right]_{B_2} = \left[ \dfrac{d \left( \overrightarrow{O_2 B} - \overrightarrow{O_2 A} \right) }{dt} \right]_{B_2}](https://s0.wp.com/latex.php?latex=%5Coverrightarrow%7BV%28B%5Cin+1%2F2%29%7D+-++%5Coverrightarrow%7BV%28A%5Cin+1%2F2%29%7D++%3D+%5Cleft%5B+%5Cdfrac%7Bd++%5Coverrightarrow%7BO_2+B%7D+%7D%7Bdt%7D+%5Cright%5D_%7BB_2%7D+-++%5Cleft%5B+%5Cdfrac%7Bd++%5Coverrightarrow%7BO_2+A%7D+%7D%7Bdt%7D+%5Cright%5D_%7BB_2%7D+%3D+++%5Cleft%5B+%5Cdfrac%7Bd+%5Cleft%28++%5Coverrightarrow%7BO_2+B%7D+-++%5Coverrightarrow%7BO_2+A%7D+%5Cright%29+%7D%7Bdt%7D+%5Cright%5D_%7BB_2%7D++&bg=ffffff&fg=1a1a1a&s=0&c=20201002)
Or, on sait, par la relation de Chasles, l’opposé de 



![\overrightarrow{V(B\in 1/2)} - \overrightarrow{V(A\in 1/2)} = \left[ \dfrac{d \overrightarrow{AB} }{dt} \right]_{B_2}](https://s0.wp.com/latex.php?latex=%5Coverrightarrow%7BV%28B%5Cin+1%2F2%29%7D+-++%5Coverrightarrow%7BV%28A%5Cin+1%2F2%29%7D+%3D++%5Cleft%5B+%5Cdfrac%7Bd+++%5Coverrightarrow%7BAB%7D+%7D%7Bdt%7D+%5Cright%5D_%7BB_2%7D+&bg=ffffff&fg=1a1a1a&s=0&c=20201002)
Voyons maintenant ce qui se passe quand on fait un produit scalaire de cette relation-là par le vecteur 
![\overrightarrow{V(B\in 1/2)} \cdot \overrightarrow{AB} - \overrightarrow{V(A\in 1/2)} \cdot \overrightarrow{AB} = \left[ \dfrac{d \overrightarrow{AB} }{dt} \right]_{B_2} \cdot \overrightarrow{AB}](https://s0.wp.com/latex.php?latex=%5Coverrightarrow%7BV%28B%5Cin+1%2F2%29%7D+%5Ccdot++%5Coverrightarrow%7BAB%7D+-++%5Coverrightarrow%7BV%28A%5Cin+1%2F2%29%7D+%5Ccdot++%5Coverrightarrow%7BAB%7D+%3D+%5Cleft%5B+%5Cdfrac%7Bd+++%5Coverrightarrow%7BAB%7D+%7D%7Bdt%7D+%5Cright%5D_%7BB_2%7D++%5Ccdot++%5Coverrightarrow%7BAB%7D+&bg=ffffff&fg=1a1a1a&s=0&c=20201002)
Or, la propriété de la dérivée d’un produit est aussi valable vectoriellement :
![\left[ \dfrac{d \overrightarrow{a}\cdot \overrightarrow{a} }{dt} \right]_{B_2} = \left[ \dfrac{d \overrightarrow{a} }{dt} \right]_{B_2} \cdot \overrightarrow{a} + \overrightarrow{a}\cdot \left[ \dfrac{d \overrightarrow{a} }{dt} \right]_{B_2} = 2 \left[ \dfrac{d \overrightarrow{a} }{dt} \right]_{B_2} \cdot \overrightarrow{a}](https://s0.wp.com/latex.php?latex=%5Cleft%5B+%5Cdfrac%7Bd+++%5Coverrightarrow%7Ba%7D%5Ccdot++%5Coverrightarrow%7Ba%7D++%7D%7Bdt%7D++%5Cright%5D_%7BB_2%7D+%3D+++%5Cleft%5B+%5Cdfrac%7Bd+++%5Coverrightarrow%7Ba%7D+%7D%7Bdt%7D++%5Cright%5D_%7BB_2%7D+++%5Ccdot+%5Coverrightarrow%7Ba%7D+++%2B++%5Coverrightarrow%7Ba%7D%5Ccdot+%5Cleft%5B+%5Cdfrac%7Bd+%5Coverrightarrow%7Ba%7D++%7D%7Bdt%7D++%5Cright%5D_%7BB_2%7D+%3D+2++%5Cleft%5B+%5Cdfrac%7Bd+++%5Coverrightarrow%7Ba%7D+%7D%7Bdt%7D++%5Cright%5D_%7BB_2%7D+++%5Ccdot+%5Coverrightarrow%7Ba%7D+++&bg=ffffff&fg=1a1a1a&s=0&c=20201002)
Et, de plus, le résultat d’un produit scalaire est un scalaire, qui ne dépend donc d’aucune base. On a donc :
![\overrightarrow{V(B\in 1/2)} \cdot \overrightarrow{AB} - \overrightarrow{V(A\in 1/2)} \cdot \overrightarrow{AB} = \dfrac{1}{2} \left[ \dfrac{d \overrightarrow{AB}\cdot \overrightarrow{AB} }{dt} \right]_{B_2} = \dfrac{1}{2} \dfrac{d AB^2}{dt}](https://s0.wp.com/latex.php?latex=%5Coverrightarrow%7BV%28B%5Cin+1%2F2%29%7D+%5Ccdot++%5Coverrightarrow%7BAB%7D+-+++%5Coverrightarrow%7BV%28A%5Cin+1%2F2%29%7D+%5Ccdot++%5Coverrightarrow%7BAB%7D+%3D+%5Cdfrac%7B1%7D%7B2%7D+%5Cleft%5B+%5Cdfrac%7Bd+%5Coverrightarrow%7BAB%7D%5Ccdot++%5Coverrightarrow%7BAB%7D++%7D%7Bdt%7D++%5Cright%5D_%7BB_2%7D+%3D+++%5Cdfrac%7B1%7D%7B2%7D+%5Cdfrac%7Bd+AB%5E2%7D%7Bdt%7D+&bg=ffffff&fg=1a1a1a&s=0&c=20201002)
Or, par propriété de la non-déformabilité de l’ensemble cinématiquement équivalent 


CQFD.
Bonus : le torseur des petits déplacements
On pourrait reprendre la preuve précédente pour le torseur des petits déplacements, mais on va encore faire plus simple. La relation qui va nous intéresser ici est la suivantes :
![\left[ \overrightarrow{ A(t) A(t+dt) } \right]_{B_2} \cdot \overrightarrow{AB} = \left[ \overrightarrow{ B(t) B(t+dt) } \right]_{B_2} \cdot \overrightarrow{AB}](https://s0.wp.com/latex.php?latex=%5Cleft%5B+%5Coverrightarrow%7B+A%28t%29+A%28t%2Bdt%29+%7D+%5Cright%5D_%7BB_2%7D+%5Ccdot++++%5Coverrightarrow%7BAB%7D+%3D++++%5Cleft%5B+%5Coverrightarrow%7B+B%28t%29+B%28t%2Bdt%29+%7D+%5Cright%5D_%7BB_2%7D++++%5Ccdot++++%5Coverrightarrow%7BAB%7D++&bg=ffffff&fg=1a1a1a&s=0&c=20201002)
Si on reprend la définition de la dérivée, on a, en utilisant intelligemment les notations de Leibniz :
![\overrightarrow{V(A\in 1/2)} = \left[ \dfrac{d \overrightarrow{O_2 A} }{dt} \right]_{B_2} = \dfrac{ \left[ \overrightarrow{O_2 A} (t+dt) - \overrightarrow{O_2 A} (t) \right]_{B_2} }{dt} = \dfrac{ \left[ \overrightarrow{ A(t) A(t+dt) } \right]_{B_2} }{dt}](https://s0.wp.com/latex.php?latex=%5Coverrightarrow%7BV%28A%5Cin+1%2F2%29%7D++%3D++%5Cleft%5B+%5Cdfrac%7Bd++%5Coverrightarrow%7BO_2+A%7D+%7D%7Bdt%7D+%5Cright%5D_%7BB_2%7D+%3D+++%5Cdfrac%7B+%5Cleft%5B+%5Coverrightarrow%7BO_2+A%7D+%28t%2Bdt%29+-++%5Coverrightarrow%7BO_2+A%7D+%28t%29+%5Cright%5D_%7BB_2%7D+%7D%7Bdt%7D+%3D+++++%5Cdfrac%7B++%5Cleft%5B+%5Coverrightarrow%7B+A%28t%29+A%28t%2Bdt%29+%7D+%5Cright%5D_%7BB_2%7D+++%7D%7Bdt%7D+++++&bg=ffffff&fg=1a1a1a&s=0&c=20201002)
On obtient donc que la relation que l’on cherche à prouver est équivalent à :

Qui n’est que l’équiprojectivité des vitesses avec une multiplication par 
[Note : une preuve plus rigoureuse passerait par un développement limité au premier ordre utilisant la formule de Taylor (une linéarisation).]
Torseur des actions mécaniques extérieures, torseur cinétique et torseur dynamique
La preuve pour ces 3 torseurs est quasiment identique, donc nous allons la formuler une seule fois dans un cadre général. En effet, le moment dans ces 3 cas est de la forme :

La différence est la fonction vectorielle 
| Nom du torseur : | Symbole du moment : | Quantité intégrée : |
| Actions mécaniques |  |  |
| Cinétique |  |  |
| Dynamique |  |  |
On veut donc maintenant prouver que :

Comme avec le torseur cinématique, on va repasser par la définition. On va donc s’intéresser à la différence, on va pouvoir profiter que la région d’intégration soit la même pour fusionner les 2 intégrales en 1 intégrale unique. On profite de la linéarité de l’intégrale et du produit vectoriel, on a donc :

En utilisant la relation de Chasles, on obtient donc :

Comme 


Non seulement la différence des 2 moments est trivialement orthogonal au vecteur 

La différence est la fonction vectorielle
| Nom du torseur : | Symbole de la résultante : | Nom de la résultante : | Quantité intégrée : |
| Actions mécaniques |  | Force | |
| Cinétique |  | Quantité de mouvement | |
| Dynamique |  | Quantité d’accélération | |
Le triomphe de Babar ou la preuve de Varignon
Toutes les personnes ayant subi un cours classique de mécanique en France connaissent cet outil qu’est le torseur… Mais le connait-on si bien que cela ?
Ce petit billet est juste là pour rappeler quelques propriétés et mettre en place quelques preuves qui sont souvent très vite passées sous silence, soit par manque d’intérêt pratique, soit par manque de fondement mathématique chez les étudiants.
Si vous souhaitez une visualisation pour mieux comprendre ce qui se passe, je vous propose cette vidéo.
Définition d’un torseur
Un torseur est un champ vectoriel équiprojectif. Je sais, cela commence fort… mais qu’est-ce que cela signifie ? Un champ vectoriel est juste une fonction qui associe un vecteur à chaque point d’un espace. Ainsi, l’accélération de la pesanteur est un champ vectoriel : en chaque point de l’espace, on peut y associer une norme et une direction. Dans le cas d’un torseur, on parlera de moment en un point.
La propriété d’équiprojectivité oblige à se tourner vers la notion d’espace vectoriel euclidien, c’est-à-dire un espace muni d’un produit scalaire, c’est-à-dire une forme bilinéaire (linéaire suivant chacune de ses deux entrées), symétrique (



Parmi les propriétés fondamentales du produit scalaire, l’une des plus importantes est la projection, qui permet de passer d’une équation vectorielle à une version scalaire ne représentant que ce qui se passe suivant une direction particulière.
L’équiprojectivité : le latin pour les nuls
Du latin aequus (égal), et projicio (jeter en avant, pro–jacio). Il s’agit donc d’une projection identique de notre champ vectoriel.
La propriété d’équiprojectivité consiste en effet à avoir, pour deux points différents A et B, les moments correspondants (

On peut donc réécrire la propriété fondamentale d’un champ équiprojectif comme étant :

Mais on sait tous que cette relation est presque anecdotique devant une relation bien plus importante, connue sous le nom civil de relation de Varignon, ou par son nom de scène : formule BABAR :

Ce vecteur 


Deux façons possibles, par exemple, pour se convaincre que la deuxième moitié du terme de droite est nulle :
- le produit scalaire de deux termes orthogonaux est toujours nul et le résultat d’un produit vectoriel est orthogonal à ses deux termes ;
- le produit mixte résultant a ses trois termes trivialement coplanaires (le volume du parallélépipède engendré par ces trois vecteurs est donc nul).
Nous allons garder le reste du billet pour montrer que la réciproque est vraie : pour cela, nous allons montrer que la fonction 
Si le résultat est connu, et que la preuve n’est pas si difficile que cela, au moins a-t-elle le mérite de brasser de l’algèbre linéaire et de la géométrie vectorielle, dont la maitrise peut permettre de faciliter la résolution de quelques exercices ou problèmes.
L’endomorphisme antisymétrique : parce que le grec, les mathématiciens, ils aiment bien ça aussi !
Pour endomorphisme : du grec ancien : éndon (dedans) et morphè (forme).
Pour antisymétrie : Du grec ancien anti (au lieu de, en comparaison de, contre) et du grec ancien par le latin : symmetria, composé de sýn (avec) et métron (mesure).
Un endomorphisme est juste le nom d’une application dans elle-même : on va ainsi créée l’application qui dépend d’un point d’origine arbitraire O et définie par 
Un endomorphisme 

Pour ceux qui se souviennent de ce qu’est un endomorphisme adjoint, un endomorphisme antisymétrique a son adjoint qui est également son opposé. Mais cela revient juste à la propriété montrée plus haut.
Pour prouver cette simple propriété, on va créer deux points A et B à partir de deux vecteurs quelconques 



Par bilinéarité du produit scalaire (distributivité de l’addition).

Par la relation de Chasles, puis l’utilisation de la bilinéarité du produit scalaire (distributivité de l’addition).

Par l’équiprojectivité du champ des moments.

Par bilinéarité du produit scalaire (factorisation), puis utilisation de la relation de Chasles.
Par bilinéarité du produit scalaire (factorisation), puis utilisation de la définition de l’endomorphisme 
Notre endomorphisme est donc antisymétrique… Et cela tombe très bien, parce qu’il est alors linéaire, ce qui va nous apporter beaucoup pour la suite.
Linéarité et Chasles : bye-bye l’arbitraire de l’origine
Tout endomorphisme antisymétrique est linéaire. Ceci se prouve assez facilement une fois que l’on se souvient d’une certaine propriété, qui peut sembler évidente mais que l’on va néanmoins prouver ici par souci d’exhaustivité : lorsqu’une relation vectorielle est vraie suivant toutes les projections possibles, alors elle est vraie.
En langage mathématique, on obtient donc le théorème suivant :

La réciproque est bien sûr trivialement vraie. L’implication peut sembler évidente à beaucoup de monde également, mais en faire une preuve complète en fait un bon exercice pour citer clairement les propriétés du produit scalaire utilisé et permettre de généraliser ce résultat même à des espaces vectoriels infinis. En effet, toutes les preuves précédentes et les deux qui vont suivre sont également valable dans un espace infini.

On met en facteur en faisant apparaître un zéro en terme de gauche :

En particulier, la propriété est vrai pour 

Or le produit scalaire est une forme définie (

Et donc on peut conclure :

Autrement dit, si une chose est vraie suivant tous les points de vue, cette chose est vraie. Les philosophes pourraient encore débattre, les mathématiciens non…
Revenons-en au cœur du problème : tout endomorphisme antisymétrique est linéaire. On sait, par l’antisymétrie de l’endomorphisme

On utilise ensuite la bilinéarité du produit scalaire :

Et de nouveau par l’antisymétrie de l’endomorphisme

Et cette dernière équation étant vraie quelque-soit 

Autrement dit, l’endomorphisme
Et de là tombe ce qui a pu vous sembler comme la pire escroquerie que l’on ne vous ait jamais vendue : l’endomorphisme
Pour l’instant, la définition de l’endomorphisme n’était claire que pour des vecteurs positionnés par rapport à l’origine. Essayons de résoudre maintenant un cas différent avec deux points A et B quelconques :

Par la relation de Chasles.

Par la linéarité de l’endomorphisme.

Par l’endomorphisme défini grâce au moment du point obtenu vecteur position.
Et on a donc la propriété suivante, vraie quelque soit le couple de point A, B :

On voit alors clairement que cet endomorphisme ne dépend aucunement du point d’origine et que n’importe quel autre point nous aurait donné le même endomorphisme.
Rassurés, nous changeons donc 
Endomorphisme linéaire et matrice : une histoire d’amour fructueuse
On se limitera pour la suite à un espace vectoriel fini de dimension 


Les coefficients de cette matrice sont, par définition :

Or par antisymétrie de l’endomorphisme :

Donc, 
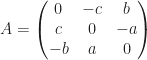
Autrement dit, la matrice 
Dans le cas d’un espace de dimension 3, on écrira pour la suite :
Pseudovecteur et produit vectoriel…
Soit l’entrée 


L’image de l’entrée

Et là, on se rend compte que l’on peut réécrire ce calcul comme un produit vectoriel :

Le fait que le vecteur résultant apparaissant ici est invariant par changement de base orthonormée directe est assez simple et direct.
Résumons donc ce que nous avons trouvé : soit un champ équiprojectif 


On a bien prouvé la relation de Varignon pour tous les torseurs définis dans un espace de dimension 3.
Mais on peut remarquer une petite « triche » : quand on passe d’une matrice à un produit vectoriel, il y a toute une notion qui apparaît très importante : celui de l’orientation de la base !
Ainsi apparaît la notion du pseudovecteur (ou vecteur axial) qui est un vecteur dont le sens dépend de l’orientation du trièdre de référence. Comme le vecteur position est toujours un vecteur « vrai » (appelé aussi vecteur polaire), dans un torseur, soit la résultante, soit le moment est un pseudovecteur.
On les reconnaît facilement, c’est ceux que les étudiants ont le plus de mal à comprendre : vecteur vitesse angulaire (résultante du torseur cinématique), moment d’une force (moment du torseur des efforts), moment cinétique et dynamique (moment des torseurs cinétiques et dynamique bien sûr). Et l’on voit par là que le problème que peuvent avoir certains étudiants est peut-être qu’intuitivement, ils ont compris que ce n’était pas tout à fait des vecteurs comme les autres (le signe dépend du sens trigonométrique, forcément choisi arbitrairement, si vous en doutez, regardez vous dans un miroir et faites des moulinets avec les bras).
À noter que ces notions de pseudovecteurs peuvent utilement être réutilisées dans d’autres branches de la physique qui utilise le rotationnel : l’électromagnétisme ou la mécanique des fluides par exemple.
Conclusion
Au départ était la curiosité de répondre à cette question qui traînait dans un coin de ma tête depuis une bonne dizaine d’année : en quoi la relation de Varignon et l’équiprojectivité sont-elles équivalentes.
Au final, j’ai eu le droit à des révisions sur les endomorphismes linéaires et la découverte de nouveaux concepts qui prennent bien plus de sens quand on comprend d’où ils viennent.
